MODUL4
PROJECT DEMO
JUDUL TONG SAMPAH DENGAN TUTUP OTOMATIS
1. TUJUAN [kembali]
a. praktikan dapat menerapkan sebuah sistem menggunakan mikrokontroller.
b. praktikan dapat mengkombinasikan berbagai macam output, akumulator, display, dan berbagai media output lainnya menjadi sebuah alat.
c. praktikan dapat merancang suatu sistem menjadi sebuah alat.
TUJUAN ALAT:
a. merancang Tong sampah yang digerakkan secara otomatis.
b. merancang tong sampah yang dapat diatur menggunakan potensio dan digerakkan oleh servo
1. PotensioMeter

2.Arduini Uno

3.LCD 16x2

4.Motor Servo

1.Potensiometer
Potensiometer juga dikenal sebagai POT, tidak lain adalah variabel resistor. Mereka dapat memberikan resistensi variabel dengan hanya memvariasikan tombol di atas kepalanya. Itu dapat diklasifikasikan berdasarkan dua parameter utama. Salah satunya adalah Resistance (R-ohm) mereka sendiri dan yang lainnya adalah peringkat Power (P-Watts) .
Nilai atau perlawanan memutuskan berapa banyak oposisi yang diberikannya pada aliran arus. Semakin besar nilai resistor, semakin kecil arus akan mengalir. Beberapa nilai standar untuk potensiometer adalah 500Ω, 1K, 2K, 5K, 10K, 22K, 47K, 50K, 100K, 220K, 470K, 500K, 1 M.
Resistor juga diklasifikasikan berdasarkan berapa banyak arus yang dimungkinkan; ini disebut peringkat Daya (watt). Semakin tinggi peringkat daya resistor semakin besar dan juga lebih banyak arus. Untuk potensiometer, peringkat daya 0,3W dan karenanya hanya dapat digunakan untuk sirkuit arus rendah.
Cara Menggunakan Potensiometer
Sejauh yang kita tahu resistor harus selalu memiliki dua terminal tetapi, mengapa potensiometer memiliki tiga terminal dan bagaimana kita menggunakan terminal ini. Sangat mudah untuk memahami tujuan terminal-terminal ini dengan melihat diagram di bawah ini.
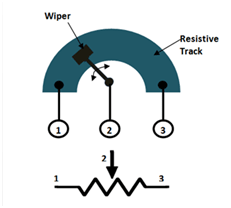
Diagram menunjukkan bagian-bagian yang ada di dalam potensiometer. Kami memiliki trek resistif yang resistan lengkapnya akan sama dengan nilai resistansi pengenal POT.
Seperti yang ditunjukkan oleh simbol, potensiometer tidak lebih dari sebuah resistor dengan satu ujung variabel. Mari kita asumsikan potensiometer 10k, di sini jika kita mengukur resistansi antara terminal 1 dan terminal 3 kita akan mendapatkan nilai 10k karena kedua terminal merupakan ujung potensiometer yang diperbaiki. Sekarang, mari kita tempat penghapus tepat pada 25% dari terminal 1 seperti yang ditunjukkan di atas dan jika kita mengukur resistansi antara 1 dan 2 kita akan mendapatkan 25% dari 10k yang 2.5K dan mengukur di terminal 2 dan 3 akan memberikan perlawanan dari 7.5 rb
Jadi terminal 1 dan 2 atau terminal 2 dan 3 dapat digunakan untuk mendapatkan hambatan variabel dan tombol dapat digunakan untuk memvariasikan hambatan dan mengatur nilai yang diperlukan
2. ARDUINO
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Microcontroller ATmega328P
|
Operating Voltage 5 V
|
Input Voltage (recommended) 7 – 12 V
|
Input Voltage (limit) 6 – 20 V
|
Digital I/O Pins 14 (of which 6 provide PWM output)
|
PWM Digital I/O Pins 6
|
Analog Input Pins 6
|
DC Current per I/O Pin 20 mA
|
DC Current for 3.3V Pin 50 mA
|
Flash Memory 32 KB of which 0.5 KB used by bootloader
|
SRAM 2 KB
|
EEPROM 1 KB
|
Clock Speed 16 MHz
|
BAGIAN-BAGIAN ARDUINO UNO
- POWER USB
- POWER JACK
- Crystal Oscillator
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
- Reset
- Digital Pins I / O
- Analog Pins
3.LCD 16 x 2
CD (Liquid Crystal
Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai
penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat
elektronik seperti televisi, kalkulator, atau pun layar komputer. Pada
postingan aplikasi LCD yang dugunakan ialah LCD dot matrik dengan jumlah
karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan
digunakan untuk menampilkan status kerja alat.
- fitur LCD 16 x 2
Adapun fitur yang disajikan dalam LCD ini adalah :
a. Terdiri dari 16 karakter dan 2 baris.
b. Mempunyai 192 karakter tersimpan.
c. Terdapat karakter generator terprogram.
d. Dapat dialamati dengan mode 4-bit dan 8-bit.
e. Dilengkapi dengan back light
- Cara Kerja LCD Secara Umum
Pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit
atau 8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan
DB7. Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah
parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan
dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang
8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu. Jika mode 4-bit
yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8-bit
(pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN setiap
nibblenya). Jalur kontrol EN digunakan untuk memberitahu LCD bahwa
mikrokontroller mengirimkan data ke LCD. Untuk mengirim data ke LCD program
harus menset EN ke kondisi high “1” dan kemudian menset dua jalur kontrol
lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.

4.Motor Servo
Konfigurasi Kawat
Nomor Kawat
|
Warna Kawat
|
Deskripsi
|
1
|
Coklat
|
Kabel arde dihubungkan ke arde sistem
|
2
|
Merah
|
Powers motor biasanya + 5V digunakan
|
3
|
Jeruk
|
Sinyal PWM diberikan melalui kabel ini untuk menggerakkan motor
|
Fitur TowerPro SG-90
- Tegangan Pengoperasian biasanya 5V
- Torsi: 2,5kg / cm
- Kecepatan operasi adalah 0,1s / 60 °
- Tipe Gigi: Plastik
- Rotasi: 0 ° -180 °
- Berat motor: 9gm
- Paket termasuk klakson gigi dan sekrup
Motor Servo
Sebagian besar motor Servo beroperasi dari 4.8V ke 6.5V, semakin tinggi tegangan semakin tinggi torsi yang dapat kita capai, tetapi umumnya mereka dioperasikan pada + 5V. Hampir semua motor servo hobi hanya dapat berputar dari 0 ° hingga 180 ° karena pengaturan persnelingnya jadi pastikan Anda memproyeksikan dapat hidup dengan setengah lingkaran jika tidak, Anda dapat memilih untuk motor 0 ° hingga 360 ° atau memodifikasi motor untuk membuat lingkaran penuh. Roda gigi di motor mudah mengalami keausan, jadi jika aplikasi Anda membutuhkan motor berjalan lebih kuat dan lama Anda bisa pergi dengan roda gigi logam atau hanya bertahan dengan gigi plastik normal.
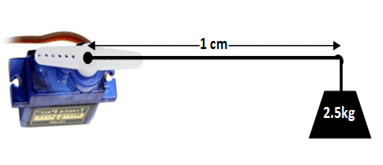
Berikutnya adalah parameter yang paling penting, yaitu torsi di mana motor beroperasi. Sekali lagi ada banyak pilihan di sini tetapi yang umum tersedia adalah torsi 2.5kg / cm yang hadir dengan Towerpro SG90 Motor. Torsi 2,5kg / cm ini berarti bahwa motor dapat menarik bobot 2,5kg saat ditangguhkan pada jarak 1cm. Jadi jika Anda menangguhkan beban pada 0,5cm maka motor dapat menarik beban 5kg sama seperti jika Anda menangguhkan beban pada 2cm maka hanya dapat menarik 1,25. Berdasarkan beban yang Anda gunakan dalam proyek, Anda dapat memilih motor dengan torsi yang tepat. Gambar di bawah ini akan menggambarkan hal yang sama.
Cara menggunakan Servo Motor
Setelah memilih motor Servo yang tepat untuk proyek tersebut, muncul pertanyaan bagaimana cara menggunakannya. Seperti yang kita ketahui ada tiga kabel yang keluar dari motor ini. Deskripsi yang sama diberikan di atas halaman ini. Untuk membuat motor ini berputar, kita harus memberi daya motor dengan + 5V menggunakan kabel Merah dan Coklat dan mengirim sinyal PWM ke kabel warna oranye. Karenanya kita memerlukan sesuatu yang dapat menghasilkan sinyal PWM untuk membuat motor ini bekerja, sesuatu ini bisa berupa Timer 555 atau platform Mikrokontroler lainnya seperti Arduino, PIC, ARM atau bahkan mikroprosesor seperti Raspberry Pie. Sekarang, bagaimana cara mengendalikan arah motor? Untuk memahami itu, mari kita lihat gambar yang diberikan dalam lembar data.
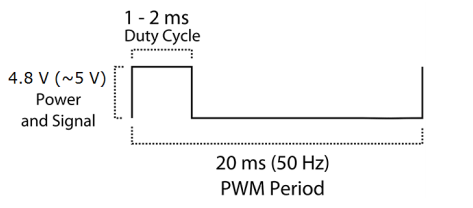
Dari gambar tersebut kita dapat memahami bahwa sinyal PWM yang dihasilkan harus memiliki frekuensi 50Hz yaitu periode PWM harus 20ms. Dari mana On-Time dapat bervariasi dari 1ms hingga 2ms. Jadi ketika waktu tepat adalah 1 ms, motor akan berada di 0 ° dan ketika 1,5 ms motor akan menjadi 90 °, demikian pula ketika 2 ms itu akan menjadi 180 °. Jadi, dengan memvariasikan waktu tepat dari 1 ms ke 2 ms motor dapat dikontrol dari 0 ° hingga 180 °
Aplikasi
- Digunakan sebagai aktuator di banyak robot seperti Biped Robot, Hexapod, lengan robot dll.
- Biasa digunakan untuk sistem kemudi di mainan RC
- Robot di mana kontrol posisi diperlukan tanpa umpan balik
- Bobot yang lebih sedikit karenanya digunakan dalam robot multi DOF seperti robot humanoid
4. FLOWCHART[kembali]


}



PROGRAM MASTER :
#define pot A0
//const int pwm=7;
void setup() {
Serial.begin(9600);
pinMode(pot, INPUT);
}
void loop() {
int nilai = analogRead(pot);
if (nilai >= 600)
{
Serial.write('1');
}
else
{ Serial.write('2');
}
}
#define pot A0
//const int pwm=7;
void setup() {
Serial.begin(9600);
pinMode(pot, INPUT);
}
void loop() {
int nilai = analogRead(pot);
if (nilai >= 600)
{
Serial.write('1');
}
else
{ Serial.write('2');
}
}
PROGRAM SLAVE :
#include <LiquidCrystal.h>
#include <Servo.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
Servo servo;
void setup() {
Serial.begin(9600);
lcd.begin(16, 2);
servo.attach(7);
lcd.setCursor(0, 0);
lcd.print("TEMPAT SAMPAH");
lcd.setCursor(0, 1);
lcd.print("OTOMATIS");
delay(10);
lcd.clear();
}
void loop() {
if (Serial.available() > 0);
{
char data = Serial.read();
if (data == '1')
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("MASUKKAN SAMPAH");
Serial.print("1");
servo.write(180);
delay(10);
}
else
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("TERTUTUP");
Serial.print("2");
servo.write(0);
delay(10);
}
}
delay (10);
#include <LiquidCrystal.h>
#include <Servo.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
Servo servo;
void setup() {
Serial.begin(9600);
lcd.begin(16, 2);
servo.attach(7);
lcd.setCursor(0, 0);
lcd.print("TEMPAT SAMPAH");
lcd.setCursor(0, 1);
lcd.print("OTOMATIS");
delay(10);
lcd.clear();
}
void loop() {
if (Serial.available() > 0);
{
char data = Serial.read();
if (data == '1')
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("MASUKKAN SAMPAH");
Serial.print("1");
servo.write(180);
delay(10);
}
else
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("TERTUTUP");
Serial.print("2");
servo.write(0);
delay(10);
}
}
delay (10);
}

7. FOTO ALAT [kembali]


TAMPAK DALAM

TAMPAK LUAR

Pada Program Arduino telah diatur pada saat potensiometer membaca nilai 1, maka LCD pada tutup tong sampahnya terbuka dan sudah dipersilahkan untuk memasukkan sampah ke dalam tong dan motor servo akan bergerak ke sudut 180 derajat, . Sedangkan saat potensiometer membaca nilai 2, maka servo bergerak ke sudut 0 derajat, yang artinya LCD pada tutup tong sampah akan menampilkan kata tertutup, kemudian servo akan bergerak ke sudut 0 derajat..
- Download Video Simulasi Rangkaian DI SINI
- Donwload Listing Pogram DI SINI
- Download Rangkaian Simulasi Proteus DI SINI
- Download Video Alat DI SINI
Tidak ada komentar:
Posting Komentar